



漫談室內定位 -- 了解室內定位各技術流派的啟蒙文章

一、室內定位的源起和現狀
室內定位,顧名思義,是與室外定位相對而言的。
室外定位技術及應用早已走入我們大家的日常生活,從汽車導航、手機地圖APP到各式各樣的LBS(Location-Based Service基于位置的服務)應用,例如:滴滴打車、大眾點評、百度外賣等。打開這類APP后的第一步,系統(tǒng)都會自動定位我們的位置。
室外定位技術以GPS為主,手機通信基站定位為輔(也叫A-GPS,即Assisted輔助的GPS)。但在室內,GPS信號會受建筑物的遮擋而嚴重衰減和反射,幾乎不可用。另一方面,民用GPS的水平面定位精度一般為5~10米,這個定位精度用于室外導航夠用,但用于室內定位并不能滿足所有場景的需求。想象下,有些店鋪/房間的整體寬度還不到5米。而手機通信基站雖然在室內仍有信號,但其定位精度太低(上百米)無法滿足室內場景的需求。所以傳統(tǒng)室外定位技術在室內基本不可用。
據有關統(tǒng)計,人的一生80%以上的時間在室內,移動通信服務80%發(fā)生在室內,80%的信息與時間和位置有關,想必室內定位也具有做大的潛力。正是看好這個方向,從2011年前后開始,國際、國內眾多室內定位創(chuàng)業(yè)公司如雨后春筍般出現,頂級互聯(lián)網公司也開始布局室內定位技術。
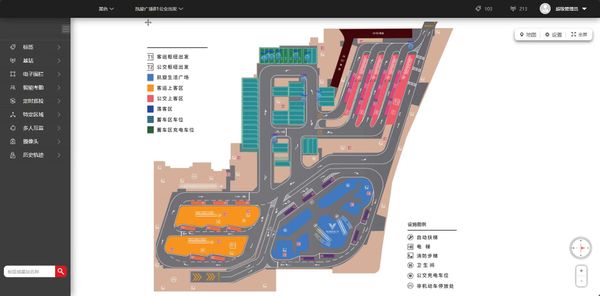
然而,后來一切進展的并不順利。到現在2016年下半年已經有幾年時間過去了,室內定位應用似乎并沒有走進大家的生活。手機地圖APP在大型購物中心里還是不好用,人們在停車場依然要費勁才能找到自己的車。近日,筆者在北京IT公司聚集地附近的清河華潤五彩城購物中心實地測試室內定位的效果。用Android手機打開百度地圖APP進行室內定位測試,下圖是筆者在同一點(紅圈)進行三次定位得到的結果(藍圈范圍),可以看到定位結果很不穩(wěn)定,甚至時常會把我定位到購物中心的外面。換成高德地圖(被阿里收購)、騰訊地圖,換成其它購物中心,效果都類似。用IOS手機則定位效果更差(原因后文會講)。定位不穩(wěn)定、結果不可信,造成室內定位應用不能進入大眾生活,相關生態(tài)也無法建立。筆者覺得這里恰好隱藏著很大的機會。

二、主流室內定位技術介紹
當前室內定位技術主要有:WIFI、藍牙、IMU(慣性導航)、LED、地磁、視覺、激光、UWB(超寬帶)、超聲波等。
這些定位技術各自有不同的特點:有些可以直接用于手機定位,有些不行;有些需要預先在室內搭建定位基站(例如WIFI AP),有些不需要;有些成本昂貴,有些幾乎無額外成本;有些定位精確到毫米,有些比較粗獷;有些對環(huán)境適應性很廣(室外室內、白天黑夜),有些對環(huán)境有特定要求。
筆者將常用的室內定位技術原理分為下文幾類。還有一些應用較少的技術,不再贅述。
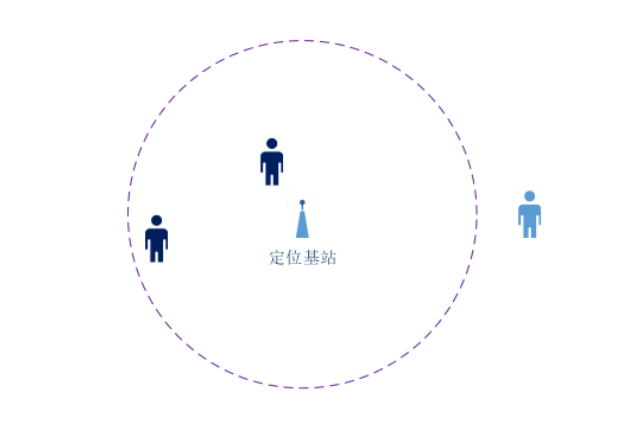
三邊定位法(也有叫三角定位)
已知待定位終端(如手機)分別到n個已知位置的基站(如固定在室內屋角)距離,那么分別以每個基站為圓心,以終端到該基站距離為半徑,可畫出n個圓,這n個圓的交點位置就是手機的位置。n為3可以定出終端在二維平面上的位置;n為4可定出基站在三維空間的位置。這就是三邊定位的基本原理,如下圖所示。

所以,定位問題最終轉化為終端和基站間的測距問題,而測距精度決定了最終的定位精度。實際上,很多室內定位技術的差異,就體現在用什么方法來測距。一種常見方法是用射頻信號的飛行時間來測距(距離=單程飛行時間x光速)。
典型技術:WIFI、藍牙、UWB定位等。
指紋法
預先測試和記錄室內環(huán)境中不同點的某物理特征值,存入數據庫。待定位時,先測量當前位置的特征值,然后與數據庫比對,定位出最可能在的位置。
典型技術:地磁、WIFI指紋。前者利用建筑物內不同點的磁場特性有區(qū)別的特點;后者儲存室內場所中多個WIFI AP在所有位置的WIFI RSSI值待比對。
圖像匹配
通過(手機)攝像頭拍攝周邊場景,或通過激光傳感器對周邊環(huán)境掃描建模,然后和數據庫中預先儲存的圖像進行比對,確定當前所在位置。
典型技術:視覺、激光。
下面筆者對各種主流室內定位技術方案分別做詳細介紹:
1. WIFI定位
按定位原理不同,分為三邊定位和指紋定位兩種。
在WIFI三邊定位方案中,因為復雜度的原因,并沒有采用飛行時間法測距,而是先測量終端的RSSI(Received Signal Strength Indication接收信號強度),再根據RSSI和距離的關系公式來估算距離。而無論這個關系公式本身,還是RSSI的測量,都有較大誤差,最終造成WIFI定位精度較低。即便在某固定點連續(xù)兩次測量RSSI,測量值也會有不同,更換不同的手機也會有差異,且基站和終端的距離越遠,距離測量誤差越大。所以一般要提高WIFI定位精度,往往要提高基站的部署密度。
定位精度:典型5米。WIFI指紋定位的精度比三邊定位略高些。
優(yōu)點
可以直接用手機定位。
可以部分共享室內現有的WIFI AP,部署成本較低。
缺點
蘋果已經在IOS上關閉了WIFI RSSI讀取接口,造成IOS手機不能主動使用WIFI定位。
滿足上網需求和滿足定位需求對WIFI AP的布置要求是有些區(qū)別的。例如房間內只要有一個AP就能上網,但此時是不能準確定位的;而一旦增加AP的數量用于定位,不僅要多花錢,也會造成多個WIFI的互相干擾,反而不利于上網。所以,WIFI定位方案部署成本低的優(yōu)勢,實際是要打個折扣的。
因為WIFI AP的性能限制,通常可同時定位的終端數量較少,一般<100個。大家也許注意到,在人多的環(huán)境(例如會展等),WIFI通常是很不穩(wěn)定的,這樣就進一步制約了WIFI定位在人員密集環(huán)境下的應用。
WIFI指紋定位方式雖然比WIFI三邊定位法精度略高,但缺點也是很明顯的。WIFI指紋易變化,只要有室內裝修布局的變化,或某個AP的開關,都會影響到指紋數據庫的有效性。而WIFI指紋需要人工覆蓋室內各點來采集,所以人工維護成本太大。
典型公司:
WIFISLAM:蘋果2013年花費2000萬美金收購。
Sensewhere:騰訊2015年投資,主要技術特點是:眾包 + WIFI/藍牙等混合定位。
北京智慧圖科技:2011年成立,是國內較早從事室內定位的創(chuàng)業(yè)公司。主要技術是:WIFI/藍牙等混合定位。
2.藍牙定位
藍牙定位主要基于三邊定位的原理。與WIFI定位類似,藍牙定位通常也采用測量藍牙RSSI來推算距離,因而也存在測量誤差大的劣勢。
藍牙4.0(BLE - Bluetooth Low Energy)的低功耗特性和蘋果的iBeacon發(fā)布,大大推動了藍牙技術在室內定位領域的應用。因為iBeacon(即BLE基站)低功耗無源(僅靠一節(jié)紐扣電池供電一年以上,不用外接電源)、成本低廉(一個iBeacon可以小于50元),所以iBeacon可以遠比WIFI AP部署的密度高,例如間隔8米部署一個。因為部署密度高,帶來的直接優(yōu)勢是藍牙定位精度可以比WIFI高(因為RSSI與距離的對應關系中,距離越近約精確,越遠誤差越大);帶來的直接缺點就是總體部署成本較高,后續(xù)維護成本也較高。
定位精度:典型3米
優(yōu)點:
可以直接用手機定位(要求有藍牙4.0硬件+相應軟件版本)。
定位精度比WIFI定位略高,且沒有IOS或Android的限制。
不用插網線或電線,iBeacon部署比較方便。
缺點:
iBeacon部署密度高才能實現更高的定位精度,所以基站總體部署成本比WIFI等其它方案要高。
iBeacon雖然很省電,但電池終有用盡的時候(有的產品短至1,2年)。而蘋果的iBeacon通信協(xié)議并不包括beacon的電量情況,會給查詢電量帶來挑戰(zhàn)。而且因為beacon數量較多,分散部署在各處,所以對后期維護是個挑戰(zhàn)。
iBeacon方案不易做反向定位(后臺服務器查詢手機的位置),需要特殊設計,增加復雜度和成本。
典型公司:
Estimote,2012年成立,主打產品是用于商場零售領域的iBeacon。
蘇州尋息電子,2014年成立,主打產品是各類iBeacon。
3. LED定位
利用天花板上安裝的特殊LED燈泡,高頻閃爍傳遞編碼信息,手機前置攝像頭接收燈光信號,解析定位。
定位精度:典型約1米
優(yōu)點:
可以直接用手機定位。
可以比WIFI和藍牙定位精度更高
缺點:
室內燈具的升級改造成本高,工作量大,燈有各種各樣的規(guī)格不一定匹配。
要定位必須要開燈。
需要手機開啟前置攝像頭,較費電,有泄露隱私風險。
不易做反向定位。
通常要與藍牙iBeacon方案結合才能做更多商業(yè)應用(例如靠近就推送優(yōu)惠),而手機在口袋中無法定位,進一步影響推送效果。 典型公司:
AcuityBrands(品牌Byteh5ght),這是個成立多年的燈光產品大廠,紐交所上市公司。
華策光通信,2013年成立,主打LED定位。
利用加速度計+陀螺儀等慣性傳感器,記錄進入室內后的動作,完成定位。因為存在難以避免的累積誤差,運動越久累積誤差越大,所以這種方法很少獨立用于室內定位。通常IMU定位作為多傳感器融合定位的重要內容,與其它定位方式(例如WIFI、藍牙等)配合使用。例如在能接收到藍牙beacon的有效信號時,以藍牙定位為準,否則以IMU定位為準,當藍牙定位有效時同步對IMU進行誤差歸0校準。
定位精度:有累積誤差,運動越久,累積誤差越大。
優(yōu)點:
可以直接用手機定位。
不需要在室內部署基礎設施。
缺點:
長時間、長距離運行后有累積誤差,需要與其它定位技術結合應用。
因為CPU是間隔對傳感器采樣的,如果運動太快,可能會錯過細節(jié)造成誤差
5. 地磁
現代建筑使用的鋼筋混凝土等結構會對地磁場造成擾動,導致室內各個位置的地磁特性各不相同。地磁定位技術,通過測量室內某位置的地磁場,與預先人工采集的室內磁場分布數據庫做比對,從而大致判斷所處位置。
定位精度:約1米量級
優(yōu)點:
可以直接用手機定位(使用手機磁力傳感器)。
不需要在室內部署基礎設施。
缺點:
室內各處的磁力數據需要預先人工覆蓋式采集,工作量大。一旦室內的裝修和布局變化,甚至室內用電器的電磁場變化,都可能影響磁力分布,磁力數據需要定時人工測試更新,維護工作量很大。
定位不穩(wěn)定,容易受干擾。一旦因為室內裝修布局或電器變化造成磁場變化,而并未來得及人工更新地磁數據庫,此時室內定位就是不準的。
典型公司:
IndoorAtlas,2014年獲得百度投資。
北京識途科技,2013年成立。
6. 超聲波
超聲波定位技術通過在室內安裝多個超聲波揚聲器,發(fā)出能被定位終端麥克風檢測到的超聲波信號。通過不同聲波的到達時間差,推測出終端的位置。
定位精度:分米級
優(yōu)點:
可以直接用手機定位
精度較高
缺點:
超聲波信號傳輸距離近,所以需要密集布置揚聲器,才能覆蓋足夠的面積。
超聲波信號易受室內多徑效應(信號反射)的影響,給定位帶來不穩(wěn)定性。
典型公司:
Shopkick,2010年成立,該公司主要通過在商場部署其超聲波定位系統(tǒng),用于商戶簽到積分。
7. 激光雷達
激光雷達(h5DAR)通過自身旋轉進行水平或豎直平面的激光掃描。發(fā)射激光到目標,接收反射信號,計算飛行時間,從而精確測距。
精度:毫米級
優(yōu)點:
測距精度目前是各種方法中最高的。
幾乎不需要在室內部署基礎設施。
缺點:
激光雷達的激光強度沒有穿透性,只能用于視線內(LOS – h5ne of Sight)測距。意味著在人多有彼此遮擋的場景下,不太好用。
激光雷達成本較高,用于服務機器人的最普通型號也普遍在上千元RMB,用于無人駕駛汽車上的激光雷達甚至超過10萬元RMB。因為手機上沒有激光雷達,所以激光定位目前主要用于機器人、無人車等成本相對不很敏感的設備對自身精確定位。
僅靠激光雷達定位的機器人是有些缺陷的,例如在下列場景容易丟失位置:
當機器人在重復場景中運行,例如相似的長廊或房間;
當機器人運行中被搬走,或被人群圍觀;
當機器人在大的開闊區(qū)域運行,超出激光雷達范圍(例如一款服務機器人常用h5DAR探測距離僅6米)
典型公司:
Velodyne,國際激光雷達領域頂級廠商,大部分無人駕駛汽車都選用該廠的激光雷達。產品價格昂貴,百度2016年8月剛投資。
思嵐科技,2014年成立,主打高性價h5DAR的創(chuàng)業(yè)公司,產品主要用于服務機器人。
北醒光子,與思嵐科技產品定位類似。
8. UWB(Ultra-Wideband超寬帶)

UWB信號的時域波形如上圖所示。不同于傳統(tǒng)的無線射頻信號有固定頻率的載波(如藍牙2.4G),UWB在不發(fā)送數據時是完全靜態(tài)的,要發(fā)送數據時才發(fā)送寬度很窄(如1ns)的脈沖信號。因該窄脈沖在頻域上是很寬的,所以叫超寬帶。因為UWB時域信號脈沖較窄,所以在時間、空間上有較大分辨力,比較容易抵抗室內信號傳輸常見的多徑效應(信號因為反射造成的多路徑傳播)的影響。
UWB定位通常是通過在固定的基站和待定位終端之間發(fā)送無線脈沖來測量飛行時間,進而測距,或通過終端到各基站之間的飛行時間差來測距,然后通過三邊定位法定位。由于UWB特有的抗多徑效應強的物理特性,測距和定位精度較高。
因為手機未集成UWB收發(fā)器,所以UWB定位目前主要應用在B端。在特定領域對佩戴了UWB標簽的人員和設備進行定位,例如對廠區(qū)人員和資產的定位。將UWB應用到機器人、無人機、VR/AR等新興領域做為輔助定位手段,也是逐漸興趣的研究熱點。
定位精度:<30厘米
優(yōu)點:
精度高,穩(wěn)定性高。抗多徑效應。
抗電磁干擾能力強,不易受常見無線電信號影響,對其它無線電信號的干擾也小。
因為不用發(fā)射載波,所以功耗可以做低,定位終端可以使用電池長期供電。
選擇合適的算法下,同時定位的終端設備可以很多(至少2K個)。
缺點:
不能直接用于手機定位。
定位終端要有UWB收發(fā)器,成本比藍牙終端略高。
常見方案中,各基站還需要連接有線或WIFI網絡來配合回傳定位數據。
典型公司:
Ubisense,老牌公司,產品主要用于工業(yè)領域,價格貴。
9. 視覺
用手機攝像頭或雙目攝像頭拍攝周邊畫面,并和已經預先儲存的環(huán)境圖像進行匹配,確定自己的位置。
定位精度:<1米
優(yōu)點:
可以直接用手機定位。
不需要在室內部署基礎設施。
缺點:
技術不成熟,穩(wěn)定性不高。
圖像處理耗費大量CPU和電量資源,定位操作方式怪異,用戶體驗不好。
理論上有不可避免的問題,例如在環(huán)境單一的長走廊或類似場景中,僅靠機器視覺是難以準確定位的。
典型公司:
Google:Project Tango
三、室內定位在C端的商業(yè)考量



